FAQ
Please feel free to ask us your individual questions via our contact form!
Last updated: May 2, 2022
Questions
In the following FAQ we provide answers to the most frequently asked questions regarding our software and hardware. However, if you have any further questions, please do not hesitate to contact us via the contact form, by e-mail or by phone. We will be glad to help you.
If you have any questions regarding individual offers and prices, please also use our contact options.
Which radio technology is used?
The ZIGPOS RTLS works hybrid with several radio technologies and differentiates between communication and localization. Ultra-wideband (UWB) is used for position determination, which enables very accurate time of flight measurements. Disadvantages are the range and power requirements. Therefore, the devices communicate in the ISM band at 2.4 GHz (according to IEEE802.15.4). Data transmission is more energy-efficient and has a much greater range. It also allows the number of devices per network to be expanded as required. In the largest RTLS at one of our customers, we manage over 20,000 devices simultaneously.
How does the position determination work?
The position of the mobile devices (e.g. the ZIGPOS badge) is calculated from distances to known fixed points (the ZIGPOS satellites). For this purpose, different mathematical methods are used. These are, depending on the application:
- super multidimensional scaling (SMDS)
- probalistic Monte Carlo localization (mcLoc)
Simple triangulation or least square methods are not robust enough against measurement errors occurring in practice. Therefore, these theoretically useful methods are not used in the ZIGPOS RTLS.
How does distance measurement work?
The distance between mobile device (e.g. ZIGPOS Badge) and fixed device (ZIGPOS Satellite) is determined by transmitting radio signals in the ultra-wideband spectrum. With 4 distances to known fixed points, a 3D position of the mobile device can be mathematically calculated. There are two methods to determine the distances in the ZIGPOS localization system:
- time of flight (ToF)
- time difference of arrival (TDoA)
These are explained below. Or in detail in the Blogpost Series: “Localization Methods”
Time of Flight Method (ToF)
In the Time of Flight method, as the name suggests, the propagation time of a radio pulse from satellite to mobile device is evaluated. By the propagation time of the signals the distance can be calculated. This so-called Time of Flight (ToF) method is the simplest way of distance determination.

The disadvantage of the ToF method becomes apparent when a large number of devices are used in the RTLS, since the distance measurements must be performed sequentially between all devices. The mobile, usually battery powered, ZIGPOS badge, needs to communicate a lot to determine the distances one by one.
The ToF method can currently determine 35 positions per second with a ZIGPOS RTLS.
Time Difference of Arrival (TDoA)
A faster and more energy efficient method is the Time Difference of Arrival (TDoA) measurement, where all satellites always synchronize their clocks in advance and only the difference of the signal propagation times has to be evaluated. The advantage is that the mobile device, which is usually battery powered, can be in sleep mode for most of the time, since it only has to emit a pulse for a short time.

With the TDoA method it is currently possible to determine 125 positions per second with a ZIGPOS RTLS.
What positioning accuracy is possible?
Localization using time-of-flight measurements with ultra-wideband technology (UWB) is significantly more accurate than known systems with Bluetooth, WLAN or LoRa. In general, you can read about 5cm accuracy from market competitors, which is also possible in theory. We at ZIGPOS prefer to present what has an influence on the accuracy and when these 5cm can really be reached. In general, UWB systems are independent of the environment at accuracies of 30-50cm. If you want to achieve higher accuracies are the following points to consider:
- Do I have enough satellites (fixed points in the infrastructure) in direct line of sight and within the receiving range (min. 3, the more, the more accurate the determined position)?
- Do strong walls, metallic objects, machines etc. disturb the radio propagation in the localization area?
- Do I have many indirect connections (satellites are in reception range, but there is no direct line of sight)?
- Does the energy requirement play a role for the objects to be localized or can I localize very frequently?
- Can I use additional information for position determination (e.g. rail vehicles, odometry data, behavior models for objects that are localized, etc.)?
Based on the existing conditions, our system offers an accuracy between 5cm and 50cm.
How long does the battery of the mobile devices last?
The RTLS is extremely energy-efficient because all devices communicate with each other in a time-synchronized manner. Thus, devices that need to be located, such as ZIGPOS Badges or ZIGPOS Tags, can be in power-saving mode most of the time that they do not have the radio activated. For example, they wake up within 1 second for only a few milliseconds and do all the communication, then fall back into sleep mode. In addition, the localization of individual devices can be tied to information such as whether a device is moving, whether it is powered by rechargeable battery or battery, or whether it is used for infrequently moving objects or dynamic vehicles.
A battery or accumulator charge therefore has very different runtimes (depending on the application) and can thus range from 1 week to 5 years. The type of system also plays a big role.
The better question is actually not how long the battery lasts, but how many positions can be determined with one charge. For example, if you only need 1 position per hour for the use case, the battery will last longer than if you want to have a position determined every second. The positioning method used also plays a role.
The better question is actually how many positions can be determined with one charge. If you only need 1 position per hour for the use case, for example, the battery will last longer than if you want to have a position determined every second. Also the used positioning method plays a role, our technical sales department will be glad to help you.
| # Positions | Battery life* |
Example use case |
|---|---|---|
| 5 per second | 1 week | Vehicle tracking |
| 1 per second | 1 month | Standard |
| 1 per minute | 3 months | Palette |
| 1 per hour | 6 months | Inventory |
* the effect of self-discharge becomes more relevant with longer runtime and overrides the energy consumption by the actual application
How to charge the devices?
For a fixed installation, it is recommended to power the satellites, for this you can use Power-Over-Ethernet (PoE) or 12V-48V DC power supply. For a wireless temporary installation, chargers or photovoltaic modules can be supplied to provide DC power to the satellites.
For mobile devices, the following options are available:
- recharging the ZIGPOS MiniTag through charging contacts. ZIGPOS offers charging stations in different sizes in which the MiniTags can easily be clipped in and taken out again.
- the ZIGPOS badge can be charged wirelessly (Qi) or via µ-USB Of course, we also offer charging stations so that several badges can be recharged simultaneously.
Do I have to install the system myself?
We offer a Starter-Kit that allows you to familiarize yourself with the technology and test the system directly on your own premises under your own conditions. This offers a quick-start guide and a setup wizard that implements the commissioning step-by-step (play background map into the system, scale the map, activate and place devices: done).
For larger installations and for systems in the industrial sector, e.g. for production-critical applications, other interfaces can of course be used, importing the positions of the anchors from CAD plans, for example. We will gladly accompany the installation at your site and support you with API adaptation, implementation, integration and consulting.
For details, please refer to your individual offer.
What are the technical requirements?
For a ZIGPOS RTLS, you need satellites (fixed infrastructure points) that are installed within the building or an area, mobile devices (ZIGPOS MiniTags or badges) that can be freely located within the area and a central control unit, the so-called RTLS server. This can be set up as a mini PC or gateway or installed as software in your own IT infrastructure.
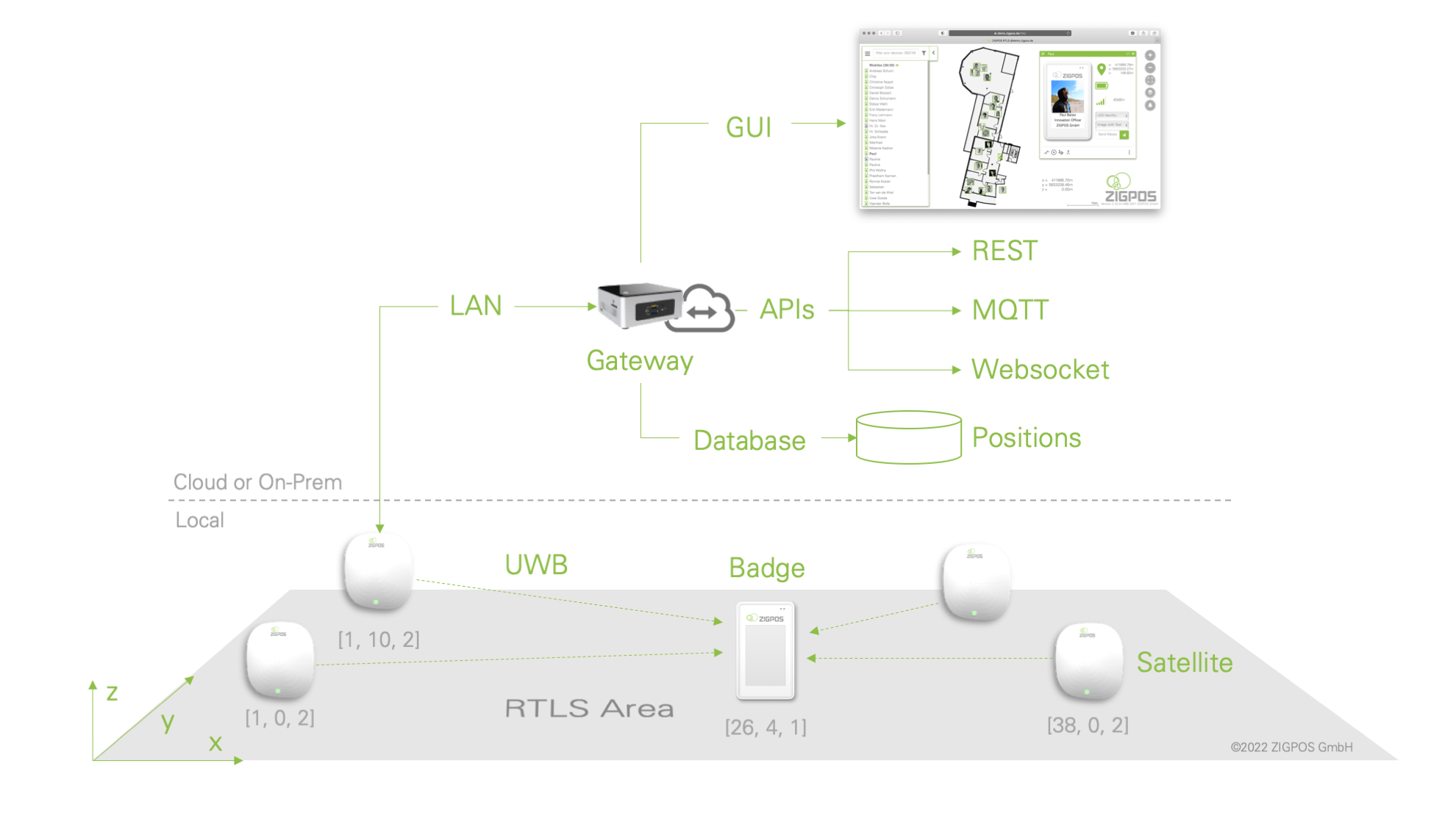
Depending on the type of installation, no prerequisites are needed at all, except a power connection for the RTLS server, up to a complete network infrastructure with Power-Over-Ethernet function for a permanent, industry-tested installation.
For the visualization of the system, a network- or WLAN-capable end device is required. Whether mobile or desktop PC is irrelevant. All data can also be integrated into MES/ERP systems via an API.
Can the system also be used for outdoor purposes?
Yes, but please note: Depending on the country and regulations, UWB-based tracking systems can be used outdoors to a limited extent. In some locations, fixed installations are not permitted, while other countries restrict the number of data packets. Still other countries restrict the transmission power.
Our system is designed so flexibly that all requirements can be taken into account and the application can therefore be implemented in most locations. ZIGPOS is part of the UWB Alliance and proactive in regulatory bodies to improve licensing and regulations for system benefit.
Is the omlox standard also supported?
Yes. ZIGPOS not only supports the OMLOX standard, but is part of the core development team. As one of the first RTLS vendors in the consortium of this standard, we have actively contributed to its development and improvement with all our experience. We see UWB as a game changer and think that the technology will catch on. For this to happen, however, it needs open, interoperable standards, as is the case with WLAN and Bluetooth. OMLOX provides this for the industry. This is possible with both the omlox Air Interface (i.e. vendor-independent device compatibility) and the omlox Hub API. Learn more in the whitepaper: “Device-level interoperability in UWB-based real-time location systems enabled by the omlox Core Zone v2 specification”.
What about the security of the transmitted data?
We are aware of the relevance of position data. Therefore, our localization service uses state-of-the-art security features. The interfaces are encrypted with TLS and thus secure against unauthorized interception. The API operations enforce an RBAC authorization scheme using OAuth to allow only legitimate access.
Is the hardware manufactured by ZIGPOS itself?
Yes and No. The production of the individual parts and the partial assembly is carried out by our contract manufacturer Foxconn. Final work is done by our employees at the Dresden site.
However, the development of the hardware is always done in-house.
If you have any question, ask!