Das ZIGPOS Coriva RTLS ist vollständig omlox konform
Mit dem Ziel, den Zugriff auf Standortdaten zu harmonisieren und die Interoperabilität zwischen RTLS und Geräten verschiedener Hersteller zu fördern, wurde der omlox-Standard 2018 von führenden Industrieunternehmen initiiert. Mittlerweile wird omlox vom Standardisierungsgremium PROFIBUS & PROFINET International (PI) gehostet und von einer stetig wachsenden Mitgliedergemeinschaft geprägt, zu der auch die TRUMPF Tracking Technologies GmbH, die ZIGPOS GmbH und viele weitere Unternehmen gehören. Der omlox-Standard definiert eine offene und generische RTLS-Architektur. Um siloartige RTLS-Systeme zu überwinden, standardisiert omlox Schnittstellen, die den Weg zu flexiblen, erweiterbaren und interoperablen Ortungslösungen ebnen.
Die omlox Luftschnittstellen-Definition bietet Interoperabilität innerhalb der omlox Core Zone zwischen verschiedenen UWB-fähigen RTLS-Geräten unterschiedlicher Hersteller und ermöglicht flexible Konfigurationen und Erweiterungen für zahlreiche Anwendungsfälle in Industrie, Logistik und darüber hinaus.
Die Kommunikation zwischen einer omlox Core-Zone Infrastruktur (d.h. Satelliten, z.B. dem CorivaSat) und mobilen Geräten (d.h. Tags, z.b. dem CorivaTag Plus) basiert auf einer Teilmenge der obligatorischen oder optionalen physikalischen Schichten, die in den IEEE 802.15.4 und IEEE 802.15.4z Standards beschrieben sind. Während die eigentliche Entfernungsmessung auf typischerweise regulierten und daher wertvollen UWB-Signalen (so genannten In-Band-Signalen) beruht, wird die gesamte andere Kommunikation wie Gerätemanagement oder Firmware-Updates auf ein separates schmalbandiges Out-of-Band (OoB)-Funkgerät verlagert.
Air-Interface In-Band-Kommunikation
Die omlox Core Zone Spezifikation sieht zwei übliche Konfigurationen für das UWB-Funkgerät vor:
- Die 8GHz World-Wide-Konfiguration, die der globalen Regulierung entspricht.
- Die 4GHz Long-Range-Konfiguration, die für Leistung und Reichweite optimiert ist.
Abhängig von den regulatorischen Einschränkungen im jeweiligen Land und den technischen Möglichkeiten der Geräte wird die Entfernung zwischen festen Satelliten und mobilen Tags in einer omlox Core-Zone auf einem oder beiden Kanälen von einer Locating Engine berechnet.
Air-Interface Out-of-Band-Kommunikation
Der OoB-Funk basiert auf einem IEEE 802.15.4-2020 Standard, welcher das ISM-Band auf 2,45 GHz nutzt. Es wird für Display-Updates der ZIGPOS Badges oder Firmware-Updates over the Air verwendet.
Um eine herstellerunabhängige Interoperabilität zwischen Satelliten und Tags zu erreichen, wurden die Konfigurationen und Konzepte auf verschiedenen Ebenen standardisiert.
Ortungsmodi
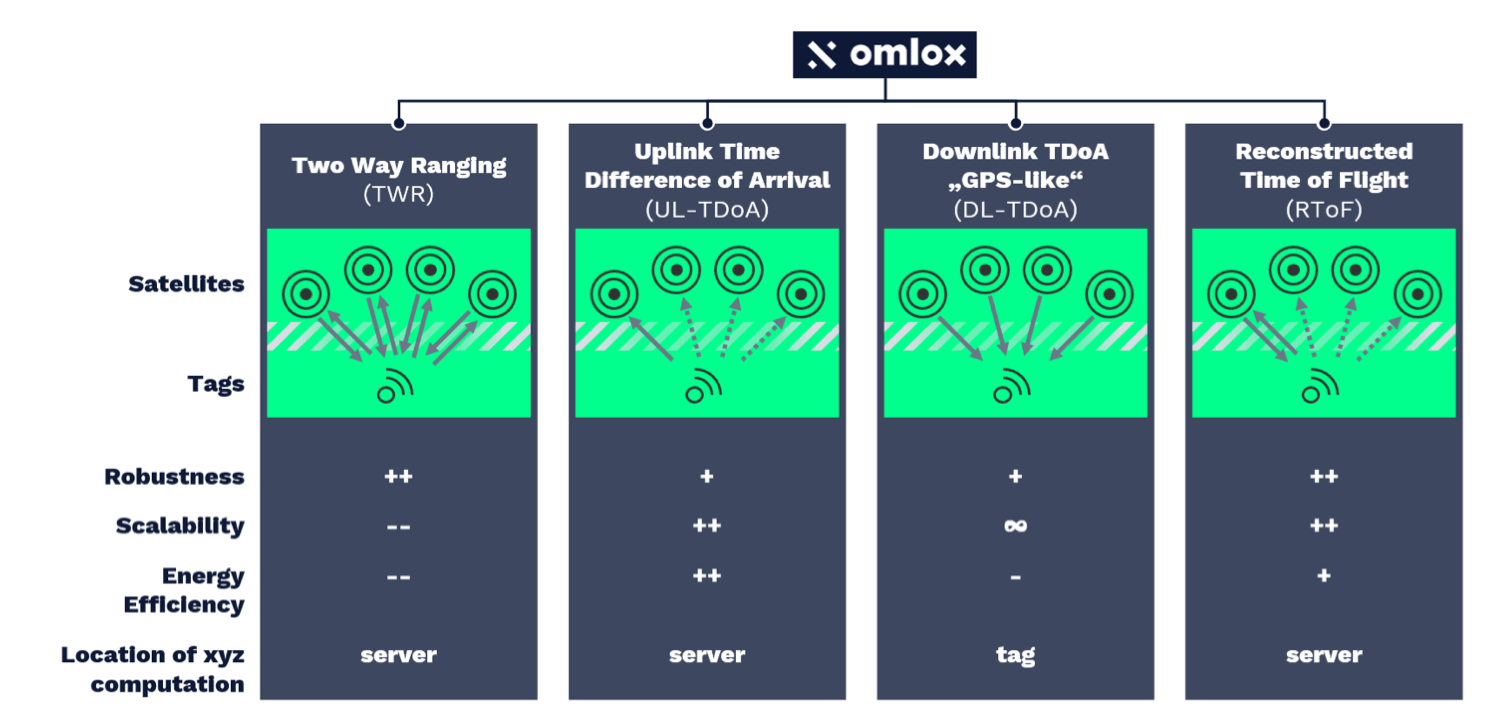
Die omlox Core-Zone Spezifikation sieht vier Ortungstechniken vor, die gleichzeitig von einer omlox Core-Zone Infrastruktur eingesetzt werden können. Für jedes Tag kann einer der folgenden infrastrukturzentrierten Ortungsmodi gewählt werden:
- Two Way Ranging (TWR)
- Upling Time Difference of Arrival (UL-TDoA)
- Downling Time Difference of Arrival (DL-TDoA)
- Reconstructed time of Flight (RToF)
Je nach Use-Case ergeben sich bei jedem Modus verschiedene Vorteile, z.B. wo die Position verfügbar ist oder wie das System skaliert werden kann.
Die omlox Core-Zone definiert eine Ortungszone, die eine robuste und präzise Ortung von Geräten ermöglicht, die mit einem Ultrabreitband (UWB) Funk ausgestattet sind. Eine omlox Core-Zone umspannt daher feste Infrastrukturgeräte (genannt Satelliten) und mobile Geräte (genannt Tags, z.B. den ZIGPOS Badge), die geortet werden sollen.
Kommunikation
Eine omlox Core-Zone Infrastruktur (bestehend aus einer Locating Engine und einem Netzwerk von zeitsynchronisierten Satelliten) kommuniziert mit Tags. Die Kommunikation zwischen einer omlox-Core-Zone-Infrastruktur (d.h. Satelliten) und mobilen Tags basiert auf einer Teilmenge der in den Standards IEEE 802.15.4 und IEEE 802.15.4z beschriebenen obligatorischen oder optionalen physikalischen Schichten. Während die eigentliche Entfernungsmessung auf typischerweise regulierten und daher wertvollen UWB-Signalen (so genannten In-Band-Signalen) beruht, wird die gesamte andere Kommunikation wie Gerätemanagement oder Firmware-Updates auf einen separaten schmalbandigen Out-of-Band (OoB)-Funk ausgelagert.
Abhängig von den regulatorischen Beschränkungen im jeweiligen Land und den technischen Möglichkeiten der Geräte wird die Entfernung zwischen festen Satelliten und mobilen Tags in einer omlox Core-Zone auf einem 4GHz und/oder 8GHz Kanal berechnet.
Locating Engine
Die Locating Engine ist ein integraler Bestandteil der omlox Core-Zone Infrastruktur, die die Position von getrackten Tags aus UWB-basierten Messungen zwischen Satelliten und Tags berechnet. Die ZIGPOS Locating Engine basiert auf einem probalistischen Monte-Carlo-Lokalisierungsalgorithmus und Kalman-Filter-Tracking, je nach Anwendungsfall.
Einsatz
Verschiedene Systemanbieter bieten individuelle Implementierungen einer omlox Core-Zone Infrastruktur und omlox-zertifizierte Tags an, die alle gemeinsam haben, dass sie die standardisierte Luftschnittstelle einhalten. Sie unterscheiden sich jedoch in einigen Aspekten wie der erreichbaren Präzision, Robustheit oder Einsatzflexibilität.
Als eine der ersten omlox Core-Zone Infrastructure-konformen Implementierungen wurde das ZIGPOS RTLS so modular entwickelt, dass es vor Ort, in der Cloud oder in Hybridkonfigurationen betrieben werden kann. Obwohl die Satelliten physisch am Ortungsort installiert werden müssen, um Signale mit den Tags auszutauschen, können die ZIGPOS Locating Engine sowie die dazugehörigen Lifecycle-Tools dort eingesetzt werden, wo es für den jeweiligen Kunden am besten passt.
Schnittstellen
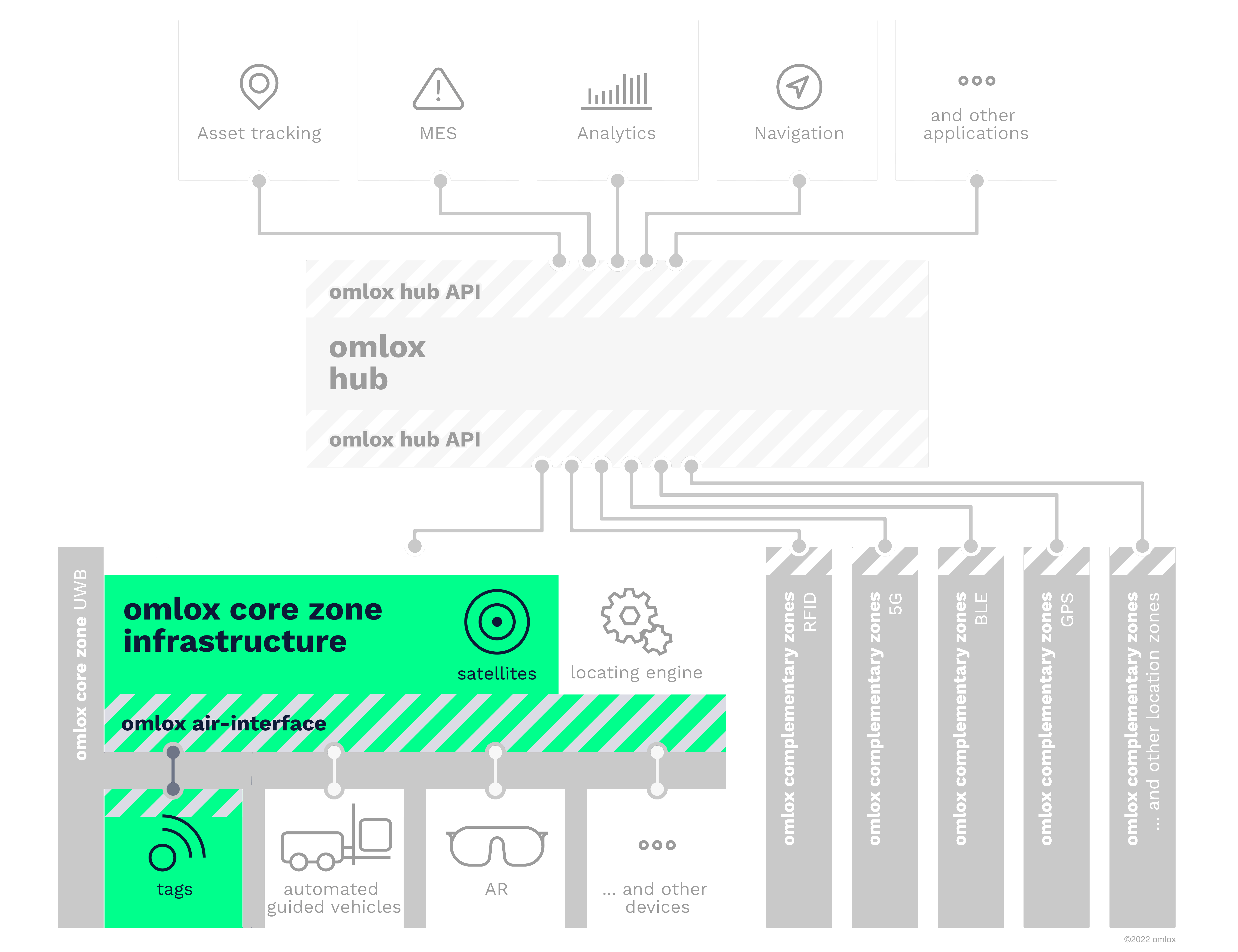
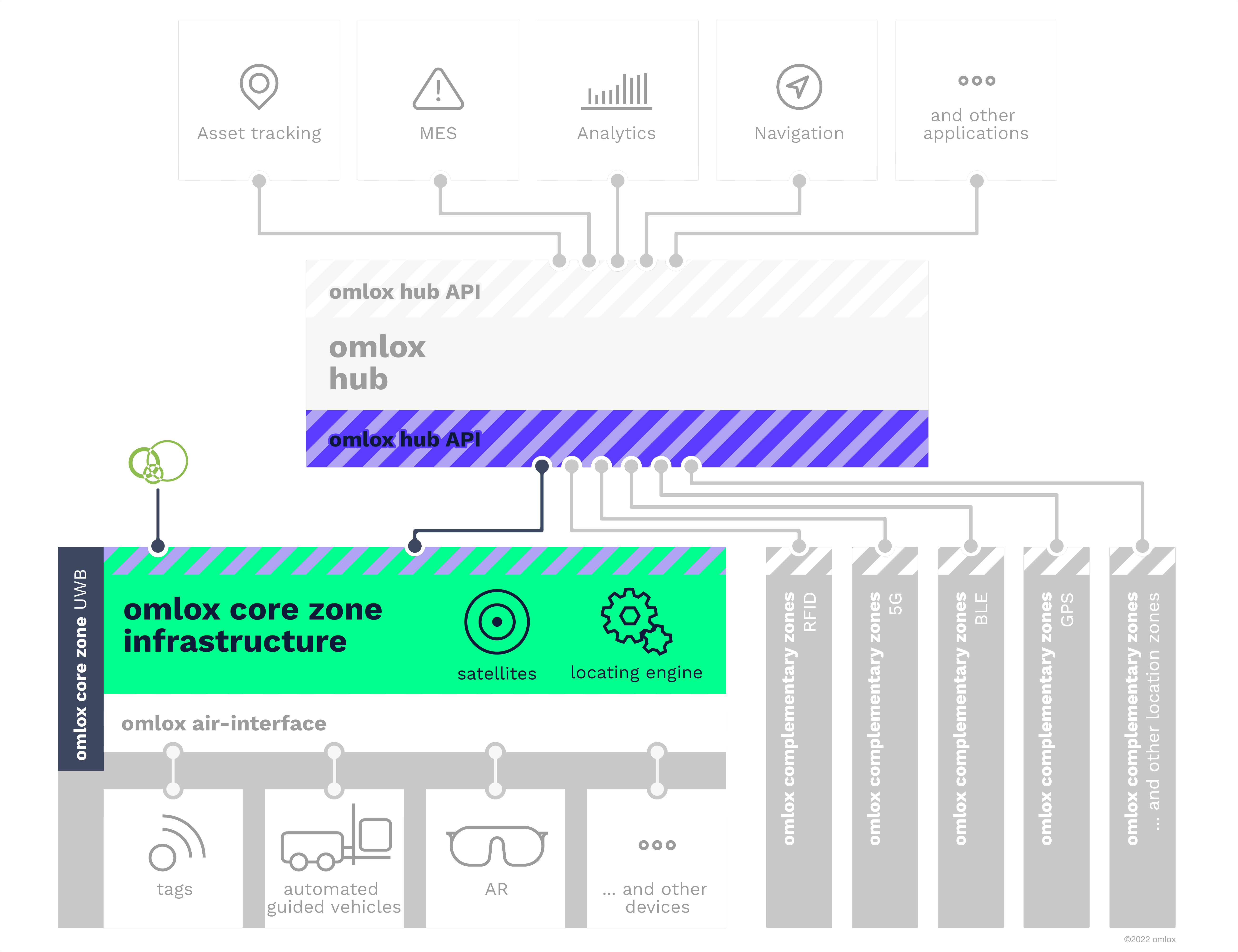
Wie alle anderen omlox Core-Zone Infrastruktur Implementierungen berechnet und veröffentlicht das ZIGPOS RTLS kontinuierlich die Positionen von Tags und kann diese über die standardisierte omlox Hub API an einen omlox Hub publizieren.
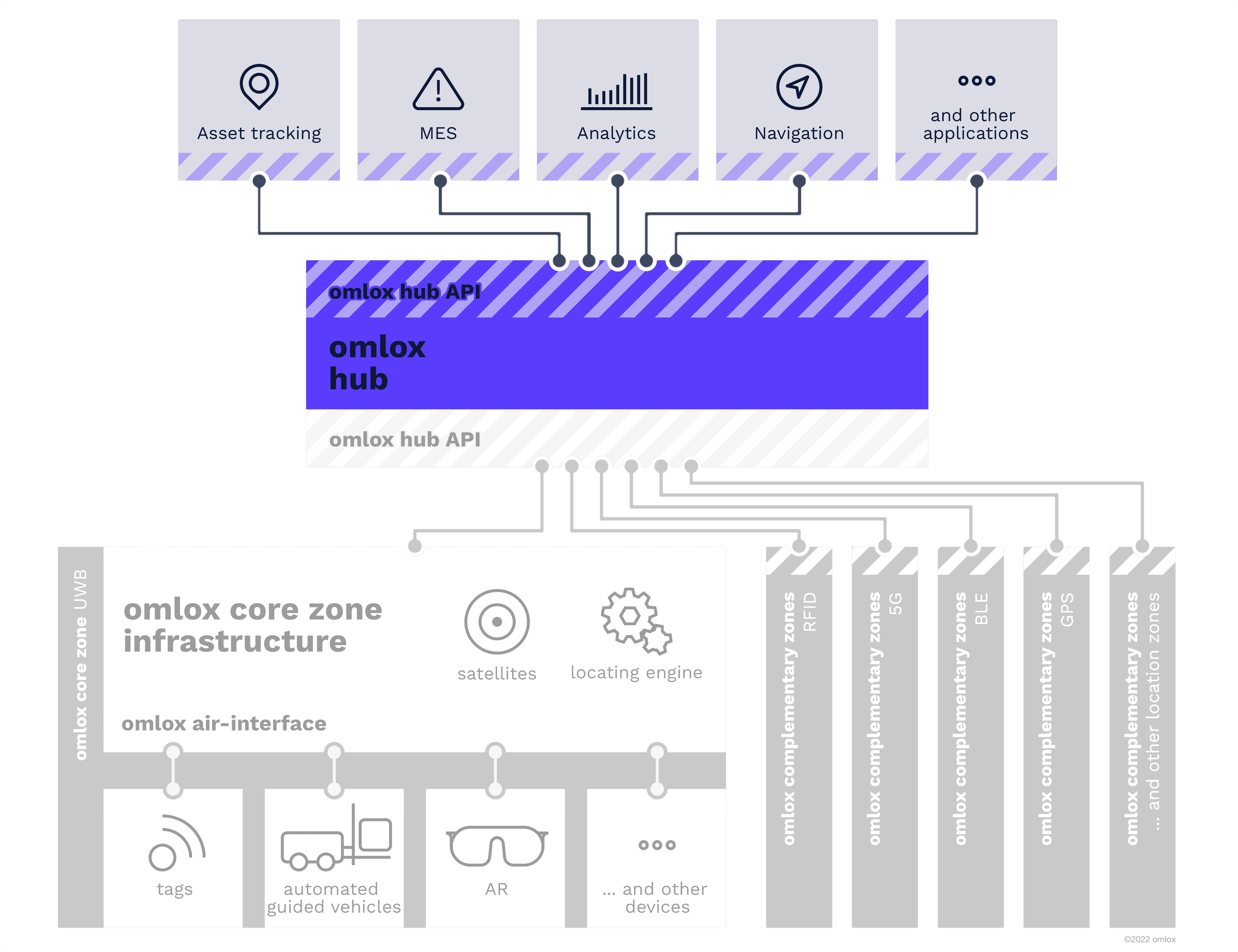
Die omlox hub API ermöglicht die Nutzung einer unbegrenzten Vielfalt von ortsbezogenen Anwendungen durch den Einsatz einer einzigen einheitlichen und technologieunabhängigen Schnittstelle für den Zugriff auf Positionen, Distanzen usw. Diese können von verschiedenen Arten von Entfernungs- und Ortungstechnologien stammen, wie UWB, BLE, GPS, 5G, WiFi oder anderen.
Siehe, zum Beispiel, die API Docs des Flowcate DeepHub

