ZIGPOS Coriva RTLS is fully omlox compliant
With the goal to harmonize access to location data and foster interoperability across RTLS and devices from different vendors, the omlox standard has been initiated by industrial leaders back in 2018. By now, omlox is hosted by the PROFIBUS & PROFINET International (PI) standardization body and shaped by an ever- growing member community including TRUMPF Tracking Technologies GmbH, ZIGPOS GmbH and many other companies. The omlox standard defines an open and generic RTLS architecture. To overcome siloed RTLS, omlox standardizes interfaces that pave the way towards flexible, extendable and interoperable locating solutions.
The omlox air-interface definition provides interoperability within the omlox Core Zone across various UWB-enabled RTLS devices from different vendors, allowing flexible configurations and extensions to address numerous use-cases in industry, logistics and beyond.
The communication between an omlox Core-Zone Infrastructure (i.e., Satellites) and mobile Tags is based on a subset of the mandatory or optional physical layers described in the IEEE 802.15.4 and IEEE 802.15.4z standards. Whereas the actual ranging relies on typically regulated and therefore precious UWB signals (called In-Band signals), all other communication like device management or firmware-updates is offloaded to a separate narrow-band Out-of-Band (OoB) radio.
Air Interface In-Band Communication
The omlox Core Zone Specification introduces two common configurations for the UWB radio:
- The 8GHz World-Wide configuration which satisfies global regulation.
- The 4GHz Long-Range configuration which is optimized for performance and range.
Depending on the regulatory restrictions in the respective country and technological capabilities of the devices, the distance between fixed Satellites and mobile Tags in an omlox Core-Zone is calculated on one or both channels by a Locating Engine.
Air Interface Out-of-Band Communication
The OoB-radio is based on an IEEE 802.15.4-2020 radio using the ISM band on 2.45 GHz. It is used for Display Updates of the ZIGPOS Badges or Firmware Update over the Air.
In order to achieve vendor-agnostic interoperability between satellites and tags, configurations and concepts on various layers have been standardized.
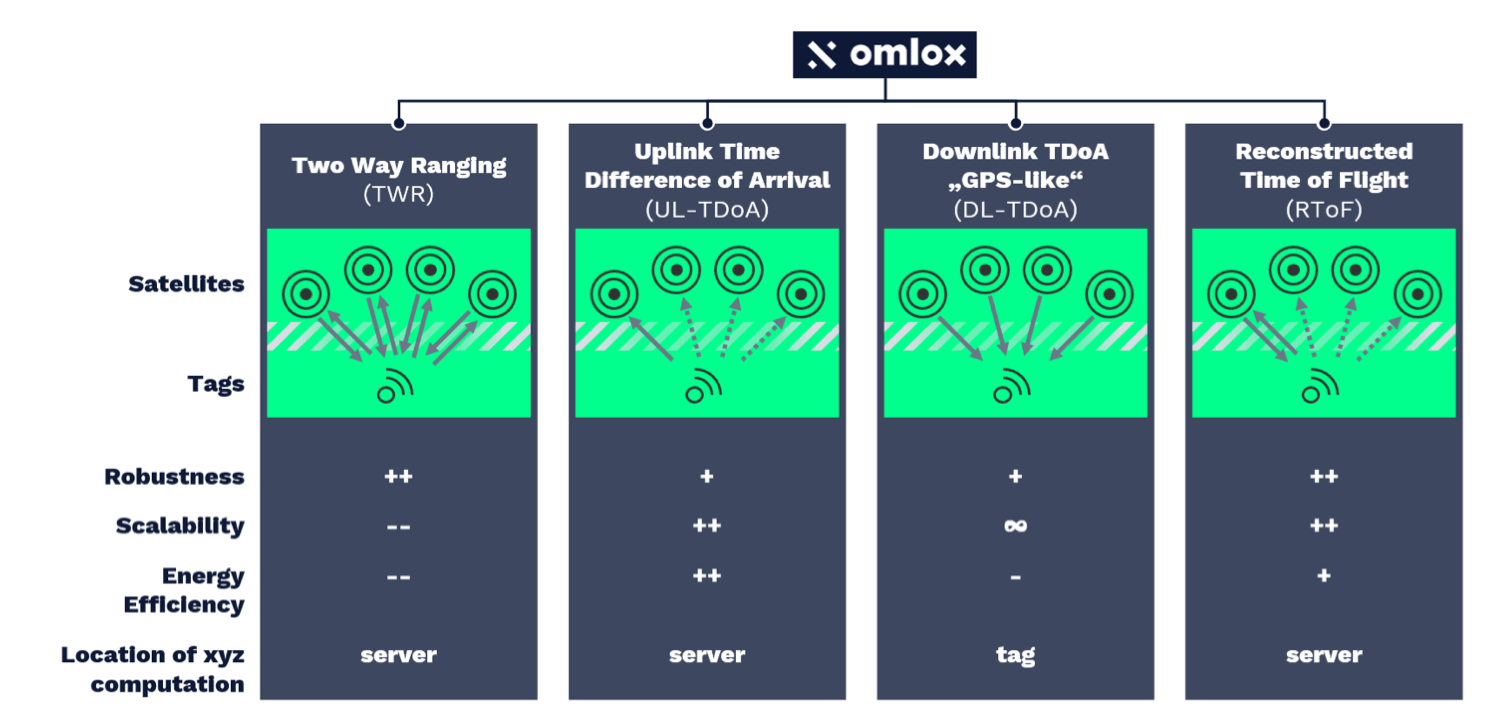
Locating Modes
The omlox Core-Zone Specification features four locating techniques that can be simultaneously deployed by an omlox Core-Zone Infrastructure. For each Tag one of the following infrastructure-centric tracking modes can be chosen:
- Two Way Ranging (TWR)
- Upling Time Difference of Arrival (UL-TDoA)
- Downling Time Difference of Arrival (DL-TDoA)
- Reconstructed time of Flight (RToF)
Depending on the Use-Case, there are several advantages with every mode, e.g. where the position is available or how the system can be scaled.
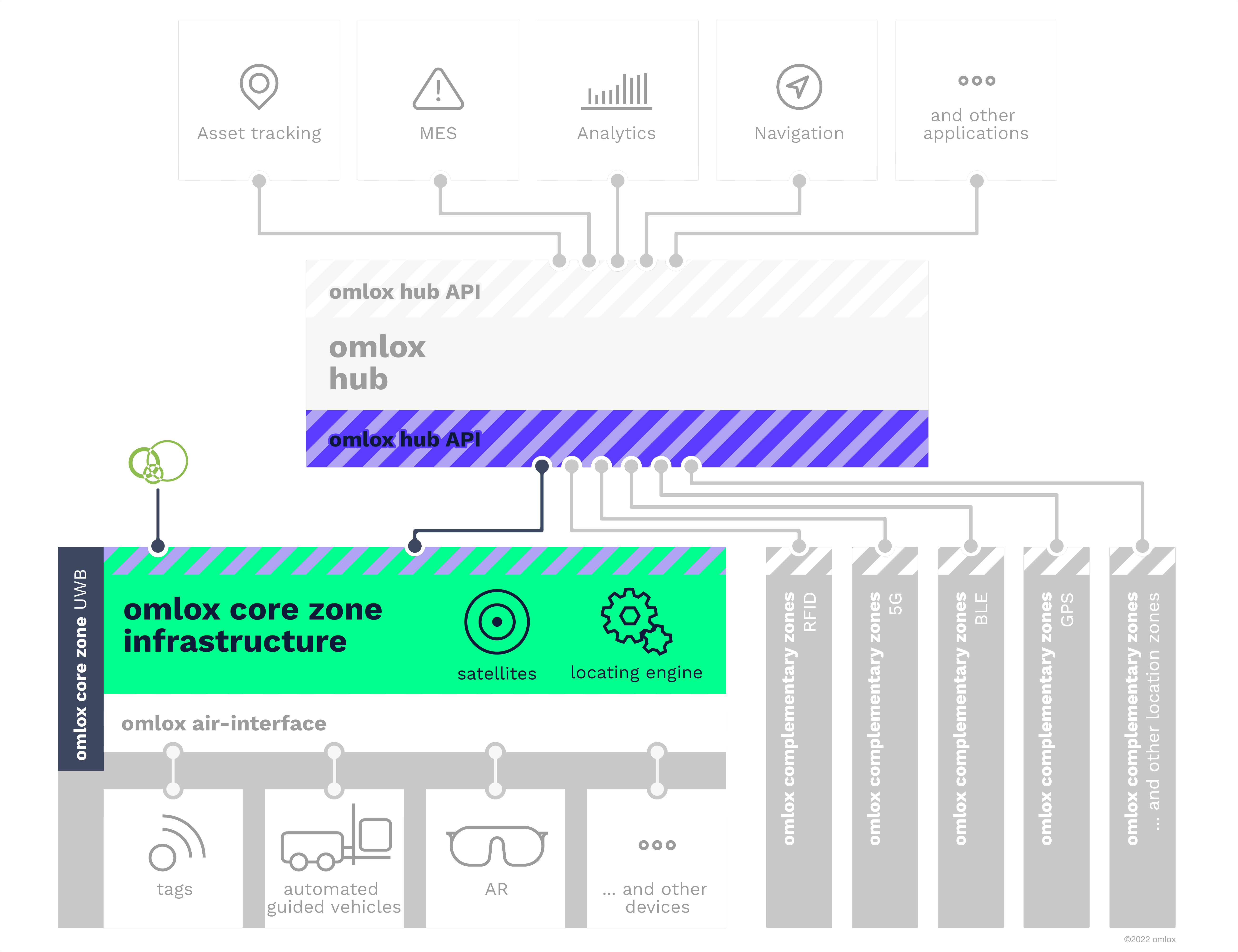
The omlox Core-Zone defines a locating zone that enables robust and precise locating of devices equipped with an ultra-wideband (UWB) radio. Therefore, an omlox Core-Zone spans fixed infrastructure devices (called Satellites) and mobile devices (called Tags, e.g. the ZIGPOS Badge) to be tracked.
Communication
An omlox Core-Zone Infrastructure (consisting of a Locating Engine and a network of time-synchronized Satellites) communicates with Tags. The communication between an omlox Core-Zone Infrastructure (i.e., Satellites) and mobile Tags is based on a subset of the mandatory or optional physical layers described in the IEEE 802.15.4 and IEEE 802.15.4z standards. Whereas the actual ranging relies on typically regulated and therefore precious UWB signals (called In-Band signals), all other communication like device management or firmware-updates is offloaded to a separate narrow-band Out-of-Band (OoB) radio.
Depending on the regulatory restrictions in the respective country and technological capabilities of the devices, the distance between fixed Satellites and mobile Tags in an omlox Core-Zone is calculated on 4GHz and/or 8GHz channel.
Locating Engine
The Locating Engine is an integral part of an omlox Core-Zone Infrastructure that calculates the position of tracked Tags derived from UWB-based measurements between Satellites and Tags. The ZIGPOS Locating Engine relies on a probalistic Monte-Carlo Localization Algorithm and Kalman Filter Tracking, depending on the Use-Case.
Deployment
Different system vendors offer individual implementations of an omlox Core-Zone Infrastructure and omlox-certified Tags that all have in common that they comply with the standardized air-interface. However, they might differ in some aspects like achievable precision, robustness or deployment flexibility.
As one of the first omlox Core-Zone Infrastructure-compliant implementations, the ZIGPOS RTLS has been developed in such a modular way that it can be operated on-premise, in the cloud or in hybrid configurations. Although the Satellites must be physically installed at the locating area to exchange signals with Tags, the ZIGPOS Locating Engine as well as accompanying lifecycle tools can be deployed wherever it fits best for the specific customer.
Interfaces
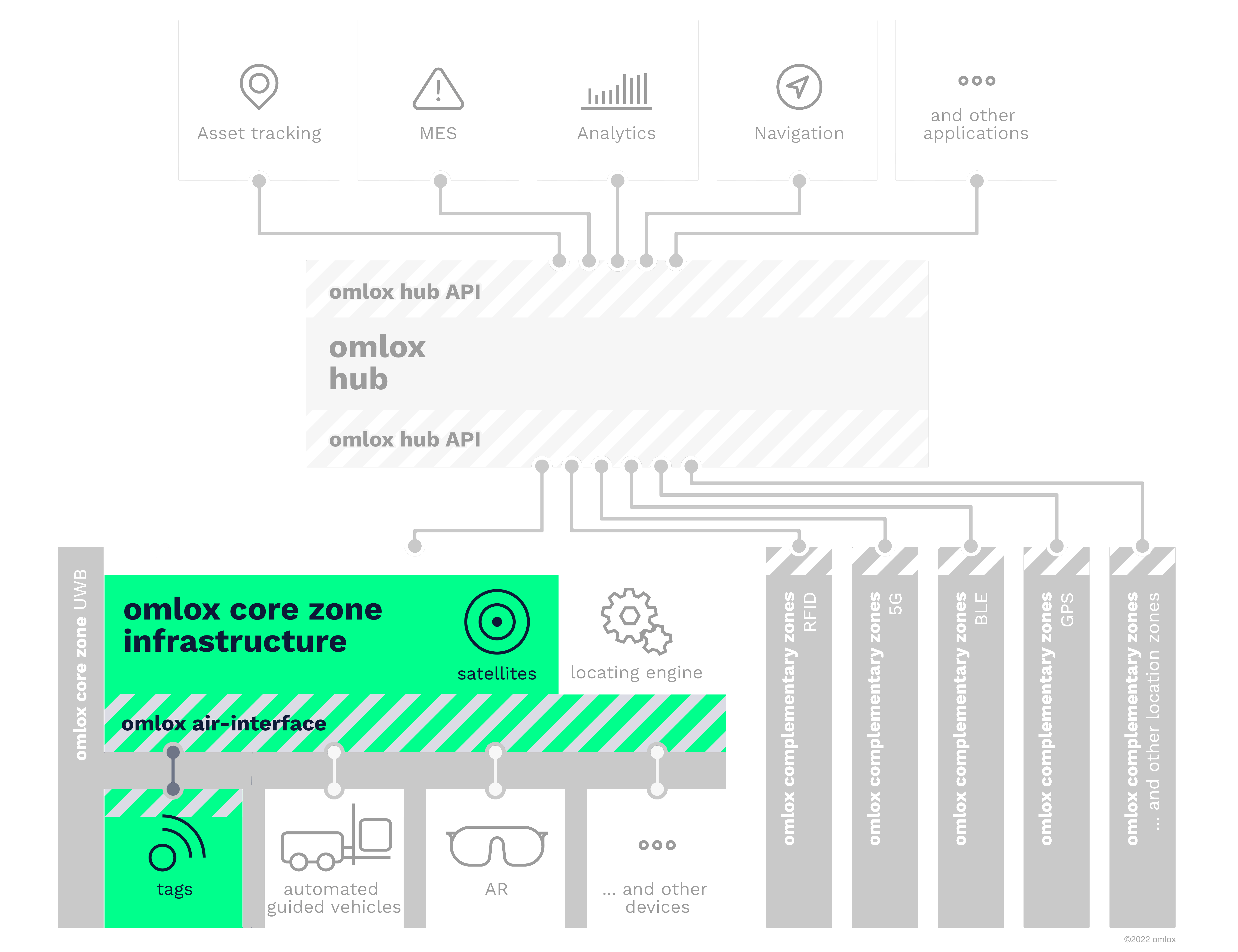
As all other omlox Core-Zone Infrastructure implementations, the ZIGPOS RTLS continuously computes and publishes the positions of Tags and can publish them to an omlox Hub via the standardized omlox hub API.
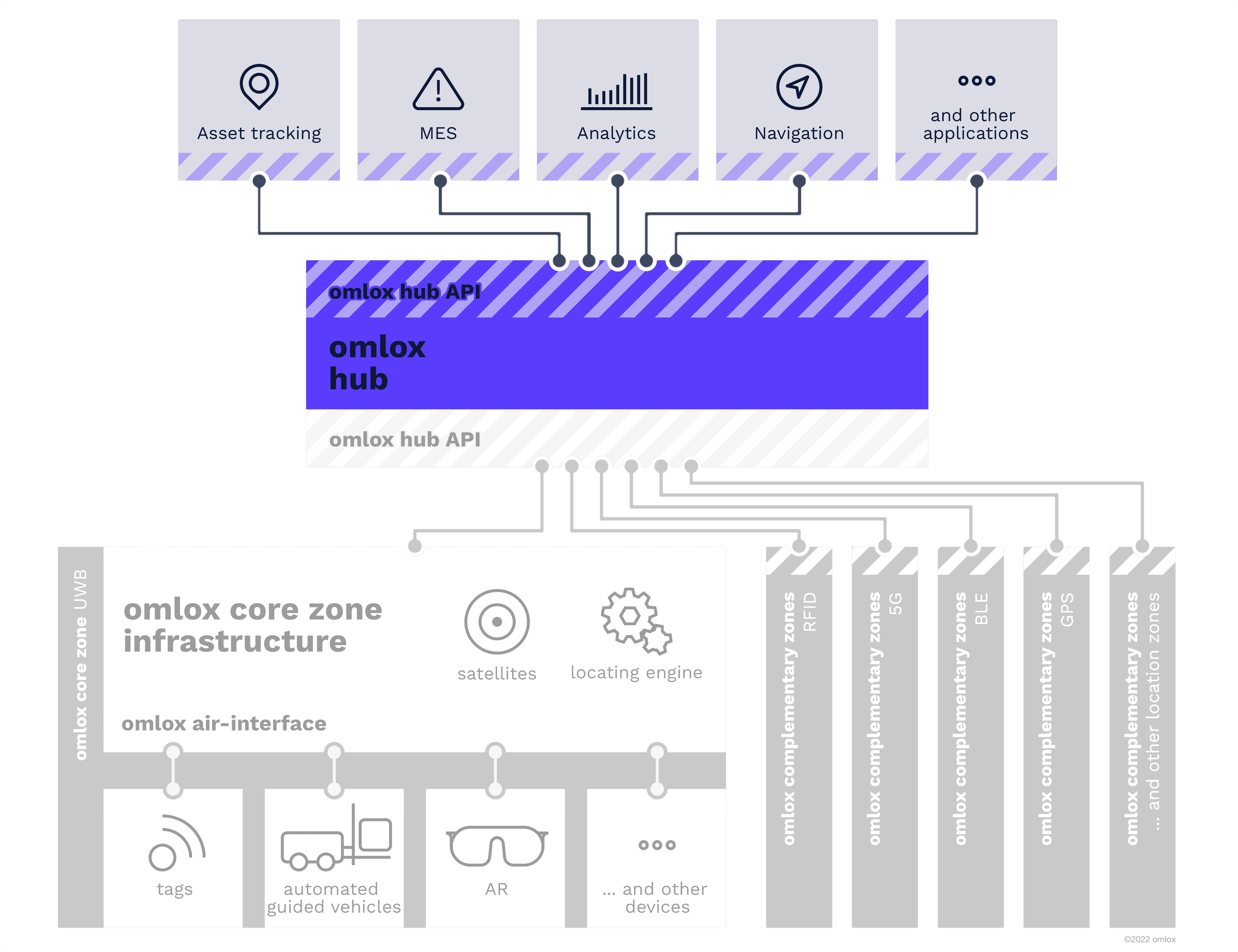
The omlox hub API allows running an unlimited variety of location-based applications by deploying just a single unified and technology-agnostic API interface accessing positions, ranges etc. Those can be originating from different kinds of ranging and locating technology, such as UWB, BLE, GPS, 5G, WiFi or others.
See, for example, the API Docs of the Flowcate DeepHub

