In the continuation to the topic “localization methods” different procedures of the realization of a localization in the ZIGPOS RTLS shall be explained and illustrated here. The article explains in a simplified way the timing and interaction between tags and satellites during the ranking process. The last part (3/3) considers localization in space and addresses its challenges as well as possible solutions
Realization in the ZIGPOS RTLS
The animations show the realization of a position determination and the hybrid operation of the ZIGPOS RTLS in the 2.4GHz ISM and UWB.
Time of Flight (ToF)
The coordinator starts the ranging procedure with a ranging request to the satellites and the tag to be localized. This is done via the ZIGPOS Sensor Network (ZSN) in the 2.4GHz ISM band. The round trip in the UWB is initiated by sending a message from the tag to the satellites. These start sending ranging response to the tag one after another with different response delay. This is done so that the messages do not overlap in time. With the determined time stamps, the calculation of the distances (tag - satellite) takes place on the tag itself. The tag then transmits these to the coordinator via the ZSN. To make the procedure as energy-efficient as possible, the tag is in sleep mode during the remaining ranging period. Finally, the position calculation takes place on the RTLS server.
The development over time becomes even clearer with the following figure
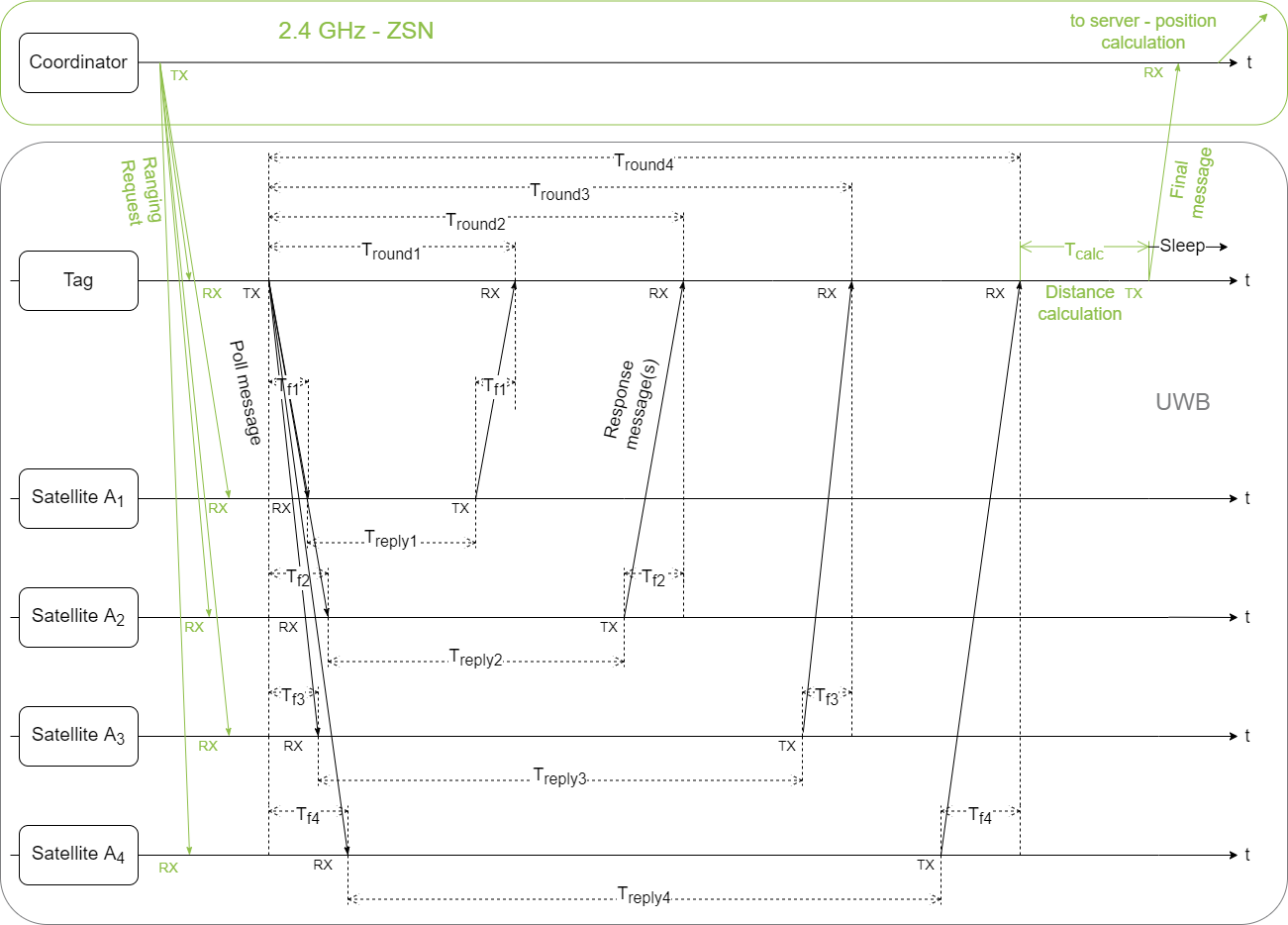
The signal propagation times (ToF) are then
$$T_{\text{f} i}=\frac{1}{2} (T_{\text{round}, i} - T_{\text{reply}, i}) \text{ with } i = \text{{1, 2, 3, 4}}$$
VAdvantages of this method are its accuracy and reliability of measurements, as well as a relatively loose requirement for synchrony of the tags to the satellites. However, the high number of interactions of the tag has an unfavorable effect on its energy consumption. Since the tag must receive several messages in a staggered manner, it is constantly on standby to receive during this time.
Time Difference of Arrival (TDoA)
Just as with ToF, a ranging period starts with the ranging request via the ZSN to the satellites and the tag. This is followed by a clock synchronization via the UWB. Its importance in TDoA has already been explained in the previous blog post. However, it does not have to be performed before every ranging period. It depends to some extent on how fast and how much the satellites’ clocks differ over time. Due to the unspecific characteristics, it is not shown in the animation and in the time sequence. Once all satellites are synchronized with each other, the actual ranging begins, where the tag sends a message to all satellites. One after the other, the satellites send the detected RX timestamps to the coordinator, which forwards them to the RTLS server. This is used to calculate the time differences, RX timestamps of the satellites to the Rx timestamp of a reference satellite, in the picture satellite 1, and to determine the position of the tag.
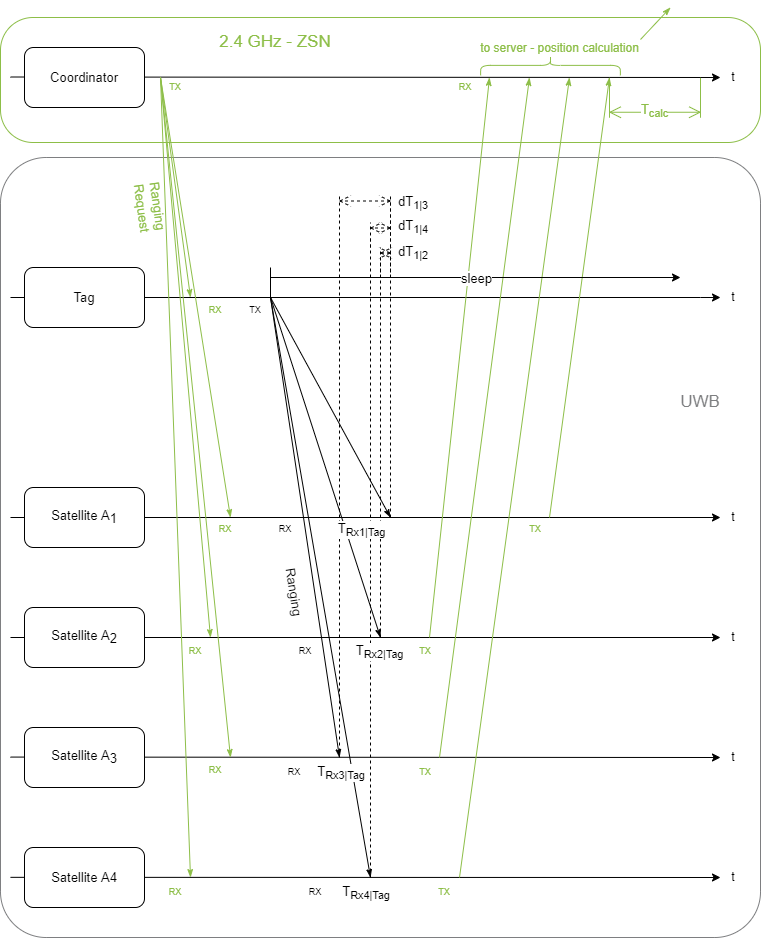
Readable are the time differences of the Rx timestamps dT between satellites A2-A4 and satellite A1. $$d{T_{\text{1}i}}= T_{\text{Rx}i\text{|Tag}} - T_\text{Rx1|Tag} \text{ with } i = \text{{2, 3, 4}} $$
The time differences are calculated on the RTLS server and the position of the tag is determined from these. The method is based on One-Way-Ranging and is characterized by its speed and energy efficiency, since the tag only sends one message and can be in sleep mode during the remaining time of a ranging period. Currently, up to 125 positions can be determined per second. Thus, this method is much faster than ToF, but not quite as precise. The possible inaccuracies in measurements outside the satellite range have already been mentioned before. However, the requirement for highly synchronous satellites is disadvantageous for the implementation. For the tag’s power requirements, however, this so-called uplink TDoA (UL-TDoA) - tag sends ranging message to satellites that determine ToA - is extremely advantageous, since it transmits only at a brief moment during the ranging period and can then be staying in sleep mode.
Conclusion and summary
The article gives a first insight into the ranging methods of the ZIGPOS RTLS, the interaction of our hardware and the implemented localization procedures. The animations in combination with the time courses illustrate the communication between tag, satellites, coordinators and RTLS server in the UWB as well as in the ISM band. The size of the RTLS and thus the number of devices in the network is scalable thanks to the hybrid system, so we can provide individual solutions for each customer. Just contact us. We look forward to hearing from you and will be happy to answer your questions.